本文采用一种 60 GHz 雷达传感器并配合其开发的 RadarNet 来识别四个方向以及全方位的滑动手势。这个小型识别器主要是要满足以下几个条件:保持在线,可靠,隐私,体积小以及日常不可见。
RadarNet 算法:
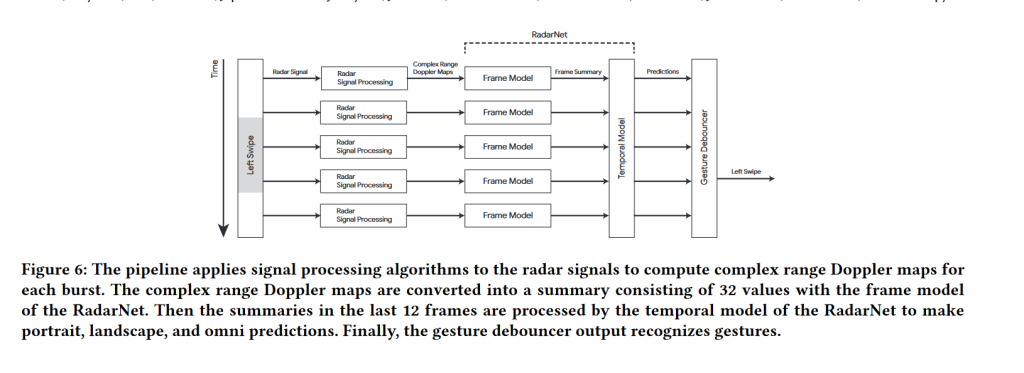
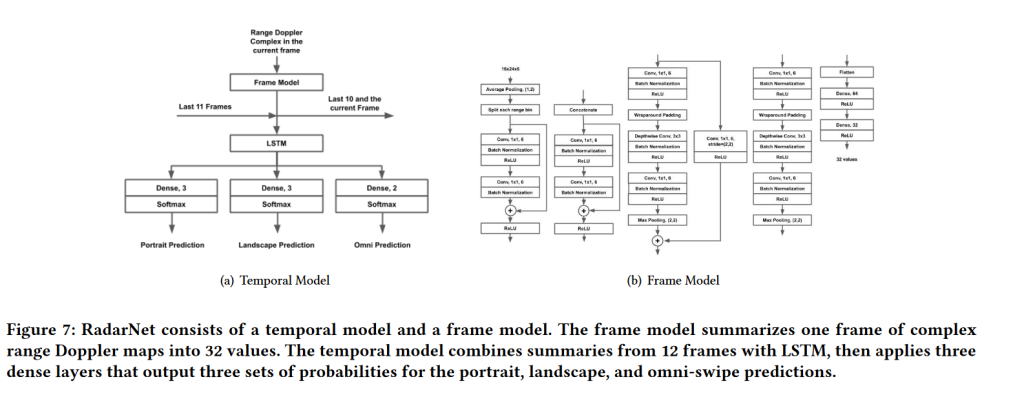
如图所示,其处理流程为:先处理雷达信号,通过 FFT 算法输出为距离-多普勒图。然后将距离-多普勒图转换为一个 32 个值组成的摘要(帧模型),随后将最近的 12 帧输入到事件模型 LSTM 中,生成对应的纵向,横向和全向的预测结果,最终通过手势去抖动模块根据说这些预测结果来识别出具体的手势。以下是时间模型和帧模型。